软物质湿滑材料在受力剪切条件下通常会发生变形,这不利于滑动界面实现低摩擦。由于水作为润滑剂黏度较低,在高载荷(特别是球-盘)接触条件下,软物质系统的摩擦力主要来源于剪切过程中接触表面之间的界面相互作用力(Fint)和接触变形引起的阻碍效应(Fdef)。在保证表面水化的条件下,最大限度降低变形,是实现软物质类湿滑材料润滑与承载性能统一的有效策略之一。
受鲶鱼肌肉硬化触发的表皮系统润滑转变行为启发(图1),中国科学院兰州化学物理研究所固体润滑国家重点实验室周峰研究员团队,报道了一种新型模量自适应润滑水凝胶材料。
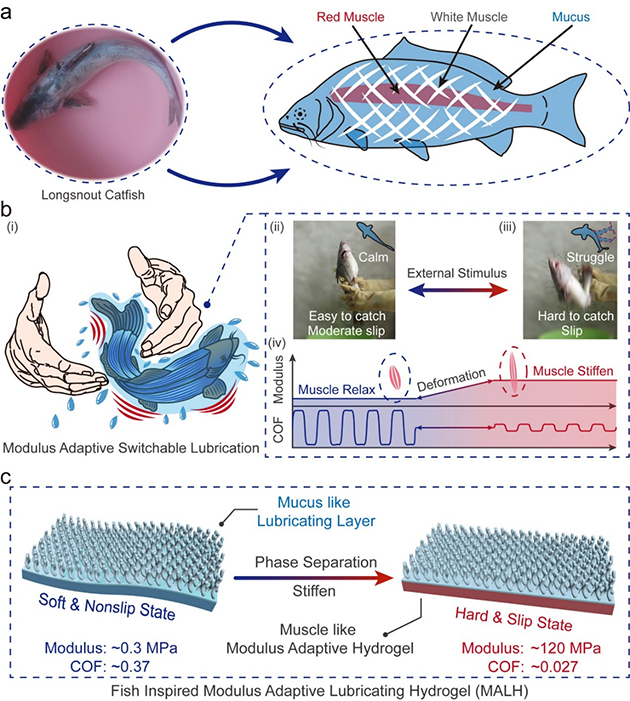
图1. MALH智能润滑材料的仿生学设计过程
该材料由微米级厚度的表面聚电解质亲水润滑层和具有热触发相变特征的水凝胶承载层组成。在低温条件下,材料处于柔软状态(模量:~0.3 MPa),滑动剪切会引起材料的严重弹性形变,摩擦对偶与材料表面接触充分,使得界面摩擦系数较大(μ~0.37)。在维持材料表层水化状态不变的条件下,对该材料进行加热致使承载层凝胶发生相分离进而变硬(模量:~120 MPa),可大幅度抑制滑动剪切过程中材料的变形,从而导致摩擦对偶与材料表面接触面积减小,摩擦系数显著降低(μ~0.027)(图2a)。
理论模拟结果也表明,这种显著的润滑转变行为主要归因于模量动态转变的自适应接触演化机制(图2b)。这种基于接触形态的润滑调控行为具有响应快、可逆性好以及宽范围载荷耐受性特点(图2c-d)。基于此,研究人员开发了智能润滑型水凝胶子弹和功能贴片,有望用于工程冲击穿刺和移动装备制动等领域(图3-图4)。
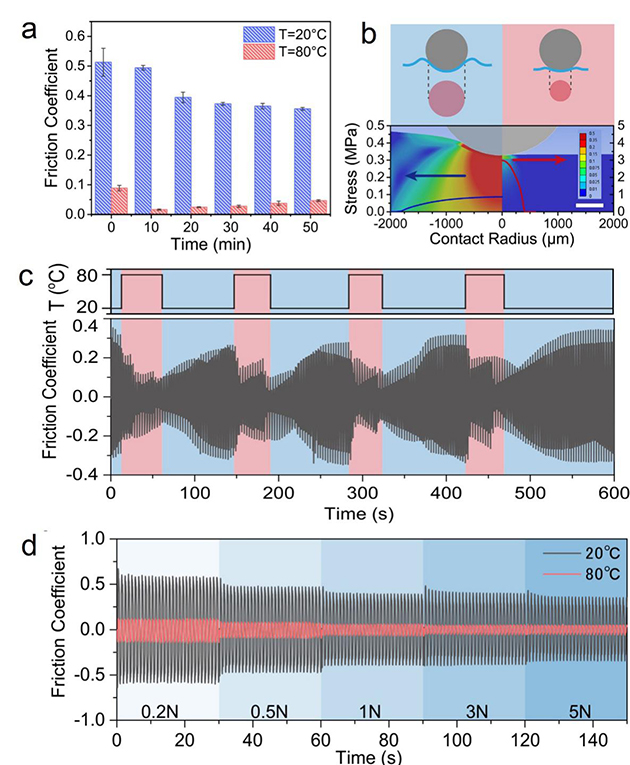
图2. MALH智能润滑材料的响应性润滑调控行为
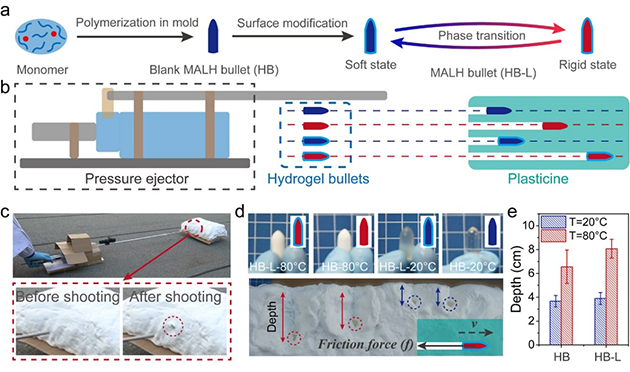
图3. MALH智能润滑子弹的穿刺行为
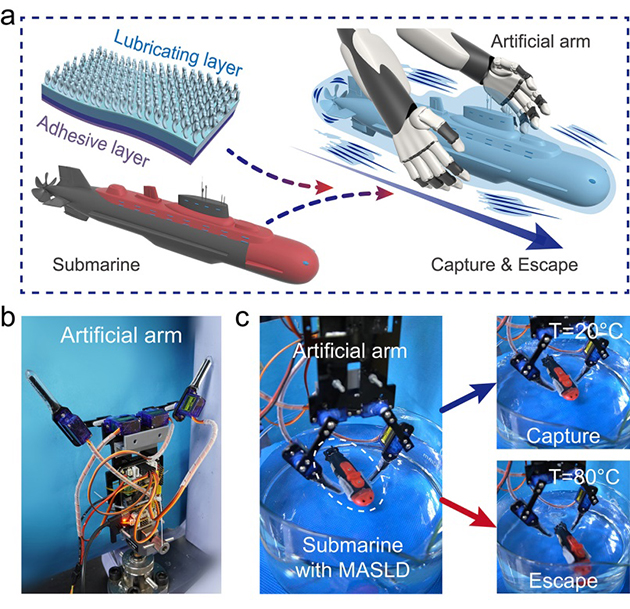
图4.基于可操控机械臂来验证MASLD智能润滑贴片的润滑调控行为
该研究对认识接触与摩擦、润滑行为的科学关系,发展高性能水润滑涂层,开发仿生智能润滑系统和软体机器人具有重要意义。
该研究工作以“Modulus adaptive lubricating prototype inspired by instant muscle hardening mechanism of catfish skin” 为题发表在Nature Communications上,中国科学院大学张云雷博士生为论文第一作者,兰州化物所周峰研究员和麻拴红副研究员为通讯作者。
以上研究工作得到了中科院先导B培育项目、国家自然科学基金重点项目、中科院青促会人才项目、兰州化物所“十四五”规划重点培育项目等的支持。
来源:固体润滑国家重点实验室